
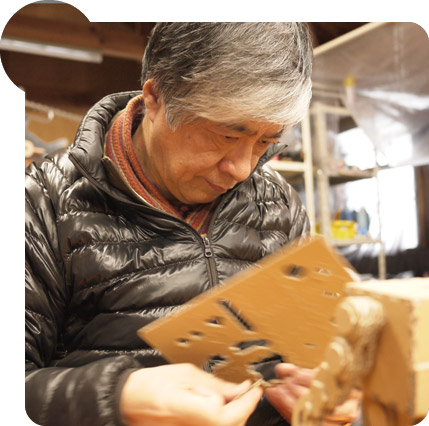

今にも歩き出しそうな、心の入ったダンボールロボット。夢形エンジニア 千田雅彦ハカセが考案したA-bot…つまりボクは、ハカセのそんな思いから生まれたんだボ。出来上がったとき「人間のともだち」としてそばにイテくれそうなもの。ロボットだけど硬いものではなくて、柔らかそうなもの。ハカセそんな思いから「素材はダンボールでも、関節が動くようにする」という発想に行き着きついたんだボ!

イメージとコンセプト
千田ハカセはボクをツクった時、「人間のともだちになる」というコンセプトを考えたんだボ。シンプルだけど心があるようなもの、今にも歩き出しそうなロボをツクりたかったらしいボ!


真似にならないように調べる
千田ハカセは「今までになかった」にこだわるんだボ!だから、ネットで色々調べて、他のものの真似にならないようにするんだボ。その時手足が動かないダンボールロボはいっぱい見つかったから、自分のロボは手足が動くようにしたんたボ。


ラフを少し書く
千田ハカセは、あまりラフスケッチはしないほうなんだボ。でも、ボクに関しては、ダンボールだけどいろいろ動かせるようにシタかったから、スケッチして動き方とか、どれがカワイイかとかを考えたらしいボ。


すぐにCADで描く
そしてやっぱり、すぐにCADに向かうんだボ!CADを使わずにスケッチだけをシテいても、寸法と頭の中の感覚が合わないらしいボ。だから寸法を入れながら感覚とズレないように設計をするんだボ。


サンプルカッターでカット
イメージしたロボットになるようにCADでパーツを準備していくんだボ。ここにハカセ特有の感覚が入るんだボ!そしてCADから直接操作して、サンプルカッターでダンボールをカットするんだボ。


試しに組み立て
実際に組み立てみて、問題点を探すんだボ。すると試作品の段階では、重心に問題があってポーズが保てなかったり、腕がすぐにダラ~ンとなってしまったり、いろいろ問題があったんだボ。


関節部分の問題を解決!
腕や足は、最初にゴムを使って関節が動くようにしたらしいボ。でもすぐに柔らかくなってしまって、ポーズが保持できなかったんだボ。0.1mm単位で穴の大きさも調整しながらい試して、最終的にシリコンチューブで問題が解決できたんだボ!


重心の問題を解決!
おじぎしたりするとすぐに倒れてしまったラシイので、重心を下のほうに持っていくことを考えたんだボ!だから、足の底にオモリを入れることに決まったんだボ!


何度も繰り返し
千田ハカセの頭の中にあるコンセプトやフィーリングに合うまで、これらの作業が何度も繰り返されるんだボ。ハカセがものづくりに没頭する時間なんだボ。奥さんに叱られないか心配だボ。


完成!してもまだまだ創造
そして完成だボ!でも、千田ハカセは、ロボを人にあげたりする中で、また問題が見つかったら修正していくんだボ。あくなき探究心なんだボ!そうやって、A-botも時にはA’-bt、A”-botという風に兄弟が増えていくんだボ!


ストーリーで楽しむ
完成してからは、当時サッカーが流行っていたからボールを蹴るポーズをさせたいとか、ミニチュア便器に座らせて「あっ、はまっちゃった!」と目を×にしたりとか、、ボクがどんなふうに行動するか想像したりして楽しむんだボ!


ファミリーの誕生
ボクができたときは、男の子のつもりで作ったから、今度は女の子が欲しいってハカセは言っていたボ!あと、赤ちゃんロボだったり、お父さんやお母さんだったり。僕も家族が増えるのが楽しみなんだボ!
